硬件平台:FL2440
内核版本:2.6.28
主机平台:Ubuntu 11.04
内核版本:2.6.39
原创作品,转载请标明出处http://blog.csdn.net/yming0221/archive/2011/06/27/6570072.aspx
1、首先配置busybox
busybox
Linux System Utilities --->
[*] mdev
[*] Support /etc/mdev.conf
[*] Support command execution at device addition/removal
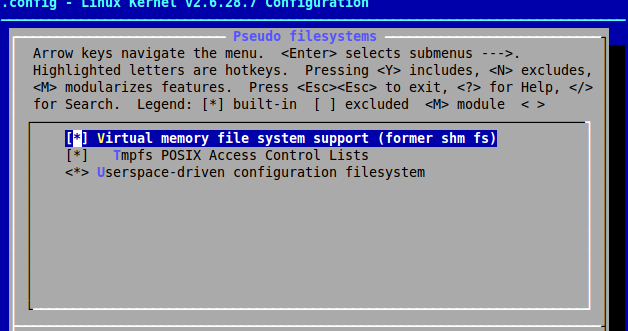
2、配置内核
3、修改文件系统里的/etc/init.d/rcS
#!/bin/sh
/bin/mount -a
/sbin/ifconfig eth0 192.168.0.3 up
#exec /usr/etc/rc.mouse
4、修改文件系统中/linuxrc文件
#!/bin/sh
#echo "mount /etc as ramfs"
#/bin/mount -n -t ramfs ramfs /etc
#/bin/cp -a /mnt/etc/* /etc
#/bin/mount -n -t ramfs ramfs /var/state/dhcp
#/bin/mount -n -t ramfs ramfs /var/log/boa
#/bin/mount -n -t ramfs ramfs /usr/Setting
#/bin/cp -a /mnt/Setting/* /usr/Setting
#/bin/mount -n -t ramfs ramfs /tmp
#/bin/cp -a /mnt/etc/* /etc
/bin/mount -t proc proc /proc
/bin/mount -t sysfs sysfs /sys
/bin/mount -t tmpfs tmpfs /dev
mkdir /dev/pts
mkdir /dev/shm
/bin/echo /sbin/mdev > /proc/sys/kernel/hotplug
/sbin/mdev -s
exec /sbin/init
4、修改/etcfstab
vi ./etc/fstab
#device mount-point type options dump fsck order
none /dev/pts devpts mode=0622 0 0
tmpfs /dev/shm tmpfs defaults 0 0
这样编写驱动时不用手动创建设备结点文件了
下面是改写的使用混杂设备的ADC驱动程序,这样可以自动创建和删除设备结点了
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/miscdevice.h> /*创建设备节点*/
#include <linux/clk.h>
#include <linux/wait.h> /*定义DECLARE_WAIT_QUEUE_HEAD*/
#include <linux/irqreturn.h> /*定义了irqreturn_t等*/
#include <linux/interrupt.h> /*request_irq disable_irq enable_irq*/
#include <asm/io.h>
#include <asm/uaccess.h>
#include <asm/irq.h> /*其中包含了#include "mach/irqs.h" */
#include <plat/regs-adc.h>
#include <mach/regs-clock.h>
#define ADC_MAJOR 102
#define ADC_NAME "my_adc"
#define SUCCESS 0
static int adc_open(struct inode *,struct file *);
static int adc_release(struct inode *,struct file *);
static int __init adc_init(void);
static int __exit adc_exit(void);
static ssize_t adc_read(struct file *,char *,size_t,loff_t *);
volatile unsigned long adc_con;
unsigned long adc_dat0;
int flag;//等待任务完成标志
unsigned long buf;//存放转换完成的数据
//声明等待队列
DECLARE_WAIT_QUEUE_HEAD(adc_wait);
struct clk *adc_clk;
static irqreturn_t adc_interrupt(int irq,void * dev_id)//中断处理程序
{
if(flag==0)
{
buf=(readw(adc_dat0) & 0x3ff );//读取转换完成的数据
flag=1;
wake_up_interruptible(&adc_wait);//唤醒等待其上的进程
printk("Read value is %ld\n",buf);
}
return IRQ_HANDLED;
}
static struct file_operations adc_ops =
{
.owner = THIS_MODULE,
.read = adc_read,
.open = adc_open,
.release = adc_release,
};
static struct miscdevice adc_misc =
{
.name = ADC_NAME,
.minor = ADC_MAJOR,
.fops = &adc_ops,
};
static int __init adc_init(void)
{
int ret;
adc_clk = clk_get(NULL,"adc");//获取时钟
clk_enable(adc_clk);//使能时钟
ret=misc_register(&adc_misc); //注册设备
if(ret<0)
{
printk("register device fail\n");
return ret;
}
adc_con=(unsigned long)ioremap(0x58000000,4);
adc_dat0=(volatile unsigned long)ioremap(0x58000000+S3C2410_ADCDAT0,4);
if( !(adc_con & adc_dat0) )
{
printk("Failed to ioremap\n");
goto handle;
}
printk("Initialized...\n");
return SUCCESS;
handle:
misc_deregister(&adc_misc);
return -1;
}
static int adc_open(struct inode * inode,struct file * file) //打开设备函数
{
//注册中断
int ret;
//disable_irq(IRQ_ADC);
//enable_irq(IRQ_ADC);
ret=request_irq(IRQ_ADC,adc_interrupt,IRQF_SHARED,ADC_NAME,1);//注册中断 IRQ_ADC在 mach/irqs.h中定义
if(ret<0)
{
printk("IRQ %d can not request\n",IRQ_ADC);
return ret;
}
return SUCCESS;
}
static int adc_release(struct inode * inode,struct file * file) //关闭设备函数
{
free_irq(IRQ_ADC,1);//释放中断
return SUCCESS;
}
static ssize_t adc_read(struct file *file,
char * buffer,
size_t length,
loff_t * offset)//设备读取函数
{
writew((1<<14)|(0x31<<6),adc_con); //设置ADCCON
writew((readw(adc_con) | 0x1),adc_con); //启动AD转换
wait_event_interruptible(adc_wait,flag);
flag=0;
}
static int __exit adc_exit(void) //驱动卸载函数
{
iounmap(adc_con);
iounmap(adc_dat0);
misc_deregister(&adc_misc);
clk_disable(adc_clk);
clk_put(adc_clk);
printk("The adc is unintialized\n");
return SUCCESS;
}
module_init(adc_init);
module_exit(adc_exit);
MODULE_LICENSE("GPL");
分享到:




相关推荐
Configured with: /scratch/maciej/arm-linux-2014.05-rel/src/gcc-4.8-2014.05/configure --build=i686-pc-linux-gnu --host=i686-pc-linux-gnu --target=arm-none-linux-gnueabi --enable-threads --disable-libm ...
Configured with: /scratch/maciej/arm-linux-2014.05-rel/src/gcc-4.8-2014.05/configure --build=i686-pc-linux-gnu --host=i686-mingw32 --target=arm-none-linux-gnueabi ...... Thread model: posix gcc ...
第一步:将arm-linux-gcc-4.3.2.bz2拷贝到虚拟机的任意目录 第二步:查看当前系统是否支持arm-linux-gcc 如果不存在 则继续如下步骤: 第三步:在/usr/local创建一个文件夹为arm mkdir /usr/local/arm 第四步:将arm...
arm-2014.05-29-arm-none-linux-gnueabi-i686-pc-linux-gnu 是由 CodeSourcery 公司基于GCC推出的的ARM交叉编译工具。可用于交叉编译ARM系统中所有环节的代码,包括裸机程序、u-boot、Linux kernel、filesystem和App...
由于上传文件大小限制,将工具链分为2个压缩文件,arm-linux-gcc-4.3.2-1.tgz和arm-linux-gcc-4.3.2-2.tgz 请务必下载完整,分别进行安装。 安装方法: 1.ubuntu 终端输入 tar -zxvf arm-linux-gcc-4.3.2-1.tgz -C ...
2.3.2 --with-float=soft --with-headers=/opt/crosstool/arm-linux/gcc-3.4.1-glibc-2.3.2/arm-linux/include --with-local-prefix=/opt/crosstool/arm-linux/gcc-3.4.1-glibc-2.3.2/arm-linux --disable-nls --...
ARM Linux交叉编译工具链,arm-2014.05-29-arm-none-linux-gnueabi-i686-pc-linux-gnu.tar.bz2
Ubuntu安装arm-linux-gcc交叉编译工具 arm-linux-gcc工具包arm-linux-gcc-5.4.0.tar.gz
arm-linux-gcc编译器,32位的4.7-2013.5版本,还有4.6~4.9的版本的arm-linuxgcc编译器在我的资源中可以找到
2.3.2 --with-float=soft --with-headers=/opt/crosstool/arm-linux/gcc-3.4.1-glibc-2.3.2/arm-linux/include --with-local-prefix=/opt/crosstool/arm-linux/gcc-3.4.1-glibc-2.3.2/arm-linux --disable-nls --...
arm-linux-gcc编译器,32位的4.6.4版本,还有4.6~4.9的版本的arm-linuxgcc编译器在我的资源中可以找到
arm-linux-gcc编译器,64位的4.6.4版本,还有4.6~4.9的版本的arm-linuxgcc编译器在我的资源中可以找到
交叉编译 arm-linux-gcc-4.4.3.tar.gz
gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf 是由 Linaro 公司基于GCC推出的的ARM交叉编译工具。可用于交叉编译32-bit Armv7 Cortex-A, hard-float, little-endian目标中的裸机程序、u-boot、Linux kernel...
windows下生成arm-linux-gcc的工具.省了自己配置和编译的很多麻烦.生成的arm-linux-gcc自己进行过验证,可以使用.
arm-none-eabi-arm-2010-09-51-for-linux是另一种交叉工具链,安装之后可以使用anm-none-eabi-gcc等命令。 #mkdir /usr/local/arm #cp /mnt/hgxxx/arm-none-eabi-arm-2010-09-51-for-linux.tar.bz2 / #tar xvfj arm...
arm-linux-gcc编译器,64位的4.8版本,还有4.6~4.9的版本的arm-linuxgcc编译器在我的资源中可以找到
gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-guneabi.tar.xz gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-guneabi.tar.xz gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-guneabi.tar.xz gcc-linaro-4.9.4-2017.01-x86_...
交叉编译工具:gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.bz2 解压命令:tar jxvf gcc-linaro-arm-linux-gnueabihf-4.9-2014.09_linux.tar.bz2
gcc-linaro-6.2.1-2016.11-x86_64_arm-linux-gnueabihf是由 Linaro 公司基于GCC推出的的ARM交叉编译工具。可用于交叉编译32-bit Armv7 Cortex-A, hard-float, little-endian目标中的裸机程序、u-boot、Linux kernel...